NghiaJenius
Ban Chủ Nhiệm
HƯỚNG DẪN KẾT NỐI CÁC MODULE
1. MOTOR & ENCODER
- Cắm bus vào motor
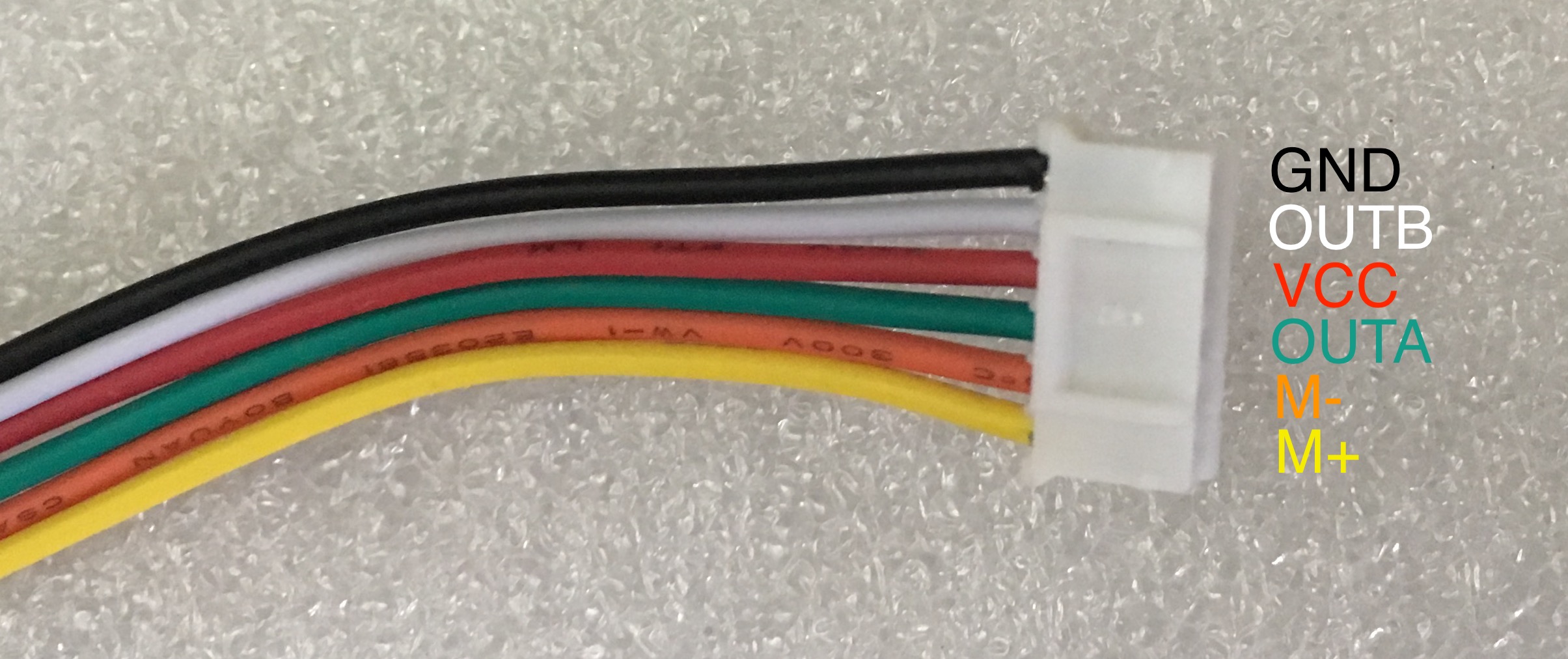
- Tách 4 tín hiệu encoder ra đấu dây vào bus 4 màu trắng: GND, OUTB, VCC, OUTA
- 4 dây này sẽ nối vào connector trắng trên board MAIN. Chú ý cấp VCC = 3V3 lấy từ LM1117-3V3 trên board main
- 2 dây động lực motor: M+, M- tách riêng ra nối vào cầu H (xem ảnh phần cầu H)
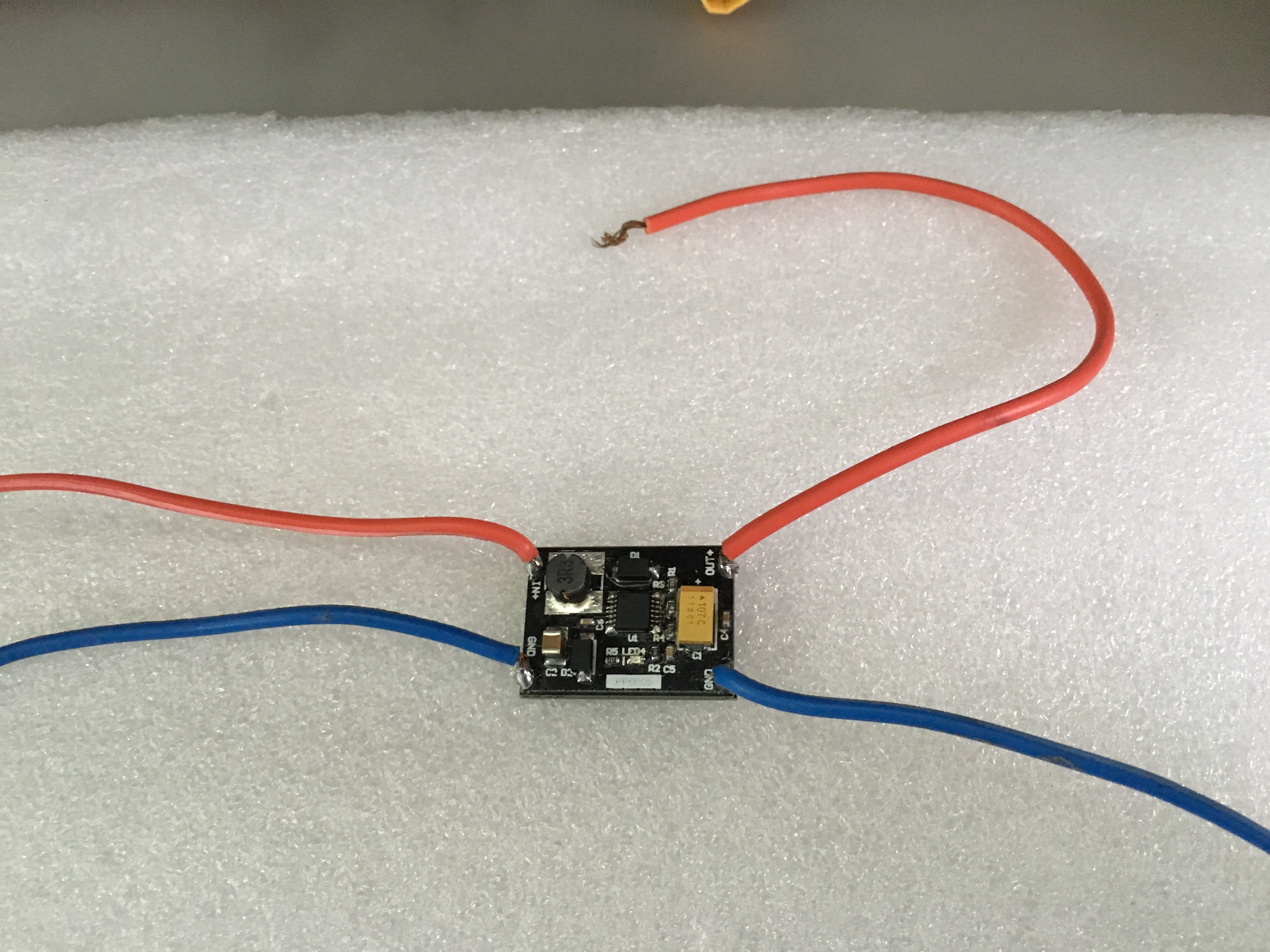
2. MẠCH BOOST
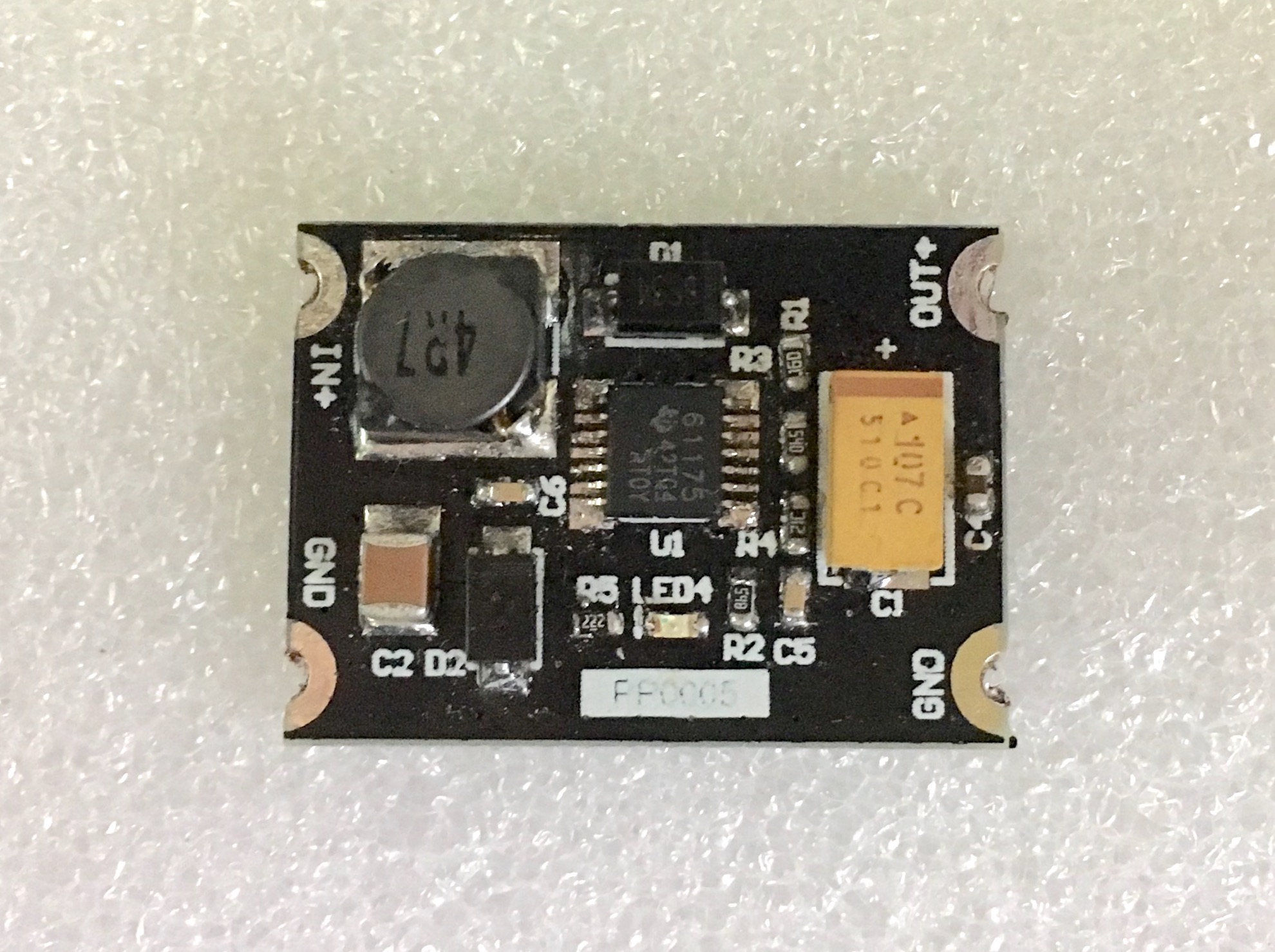
- Mạch boost sử dụng IC TPS61175, được cấu hình để ngõ ra cố định 12V khi ngõ vào tầm 7.4V (điện áp của pin Li-Po 2 cell)
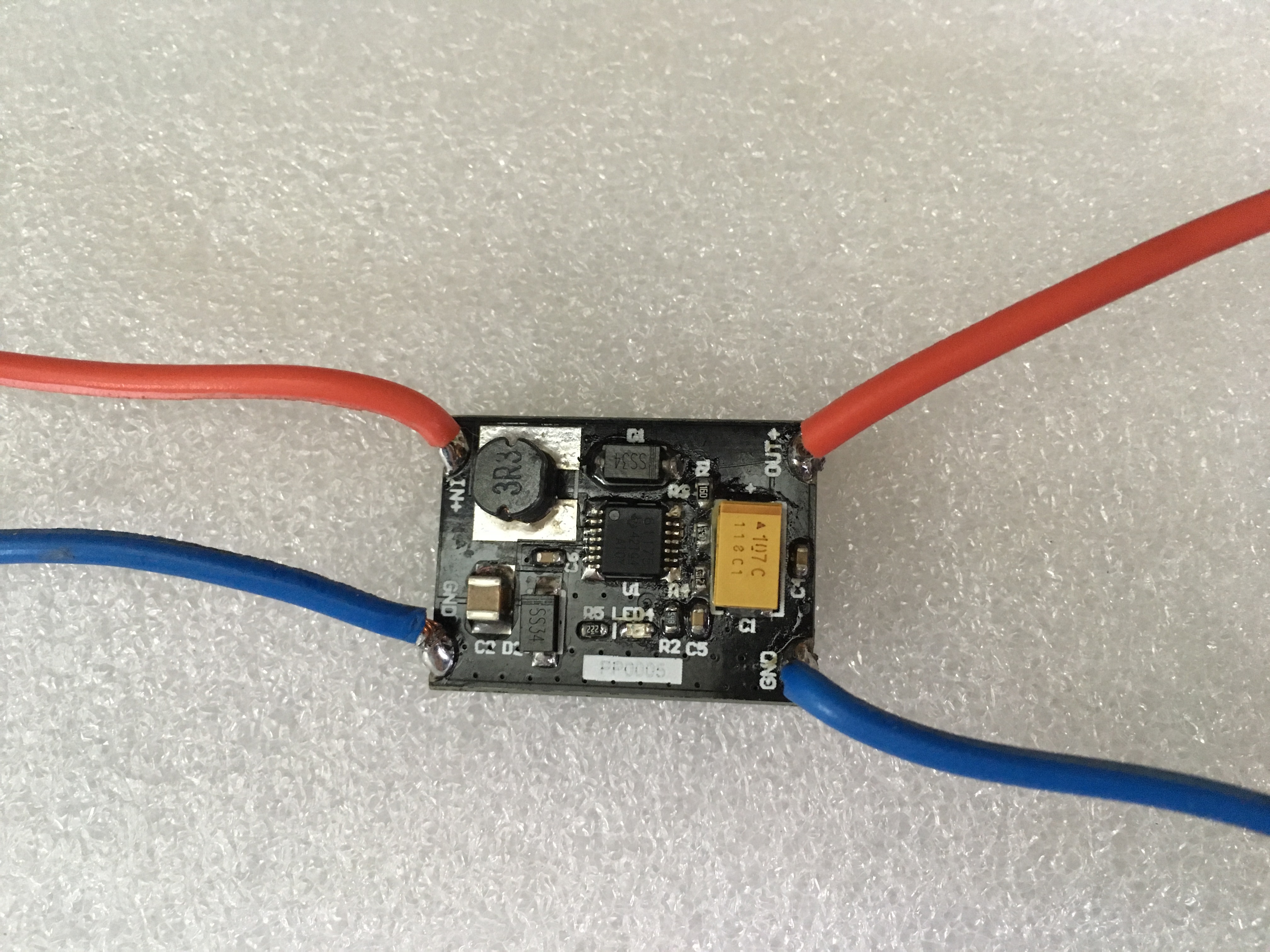
- Mạch gồm 2 hướng để kết nối nguồn vào từ Pin (IN+, GND), nguồn ra 12V chuẩn (OUT+, GND)
CHÚ Ý: KHI ĐẤU DÂY CHO MẠCH NGUỒN PHẢI CẨN THẬN NỐI ĐÚNG NGÕ VÀO-RA, VÀ CỰC TÍNH.
- Đầu tiên tìm mua dây điện loại chịu được dòng cao để làm dây nguồn, có 2 màu ĐỎ(+) XANH(-) để phân biệt cực tính.
TUYỆT ĐỐI KHÔNG SỬ DỤNG DÂY CÙNG MÀU CHO 2 CỰC!!!
- Mua 1 công tắc cho nguồn, không nên dùng pin cắm trực tiếp vào mạch mà phải thông qua công tắc cho thuận tiện. Công tắc nguồn cũng phải là loại to vừa đủ để chịu được dòng cao.
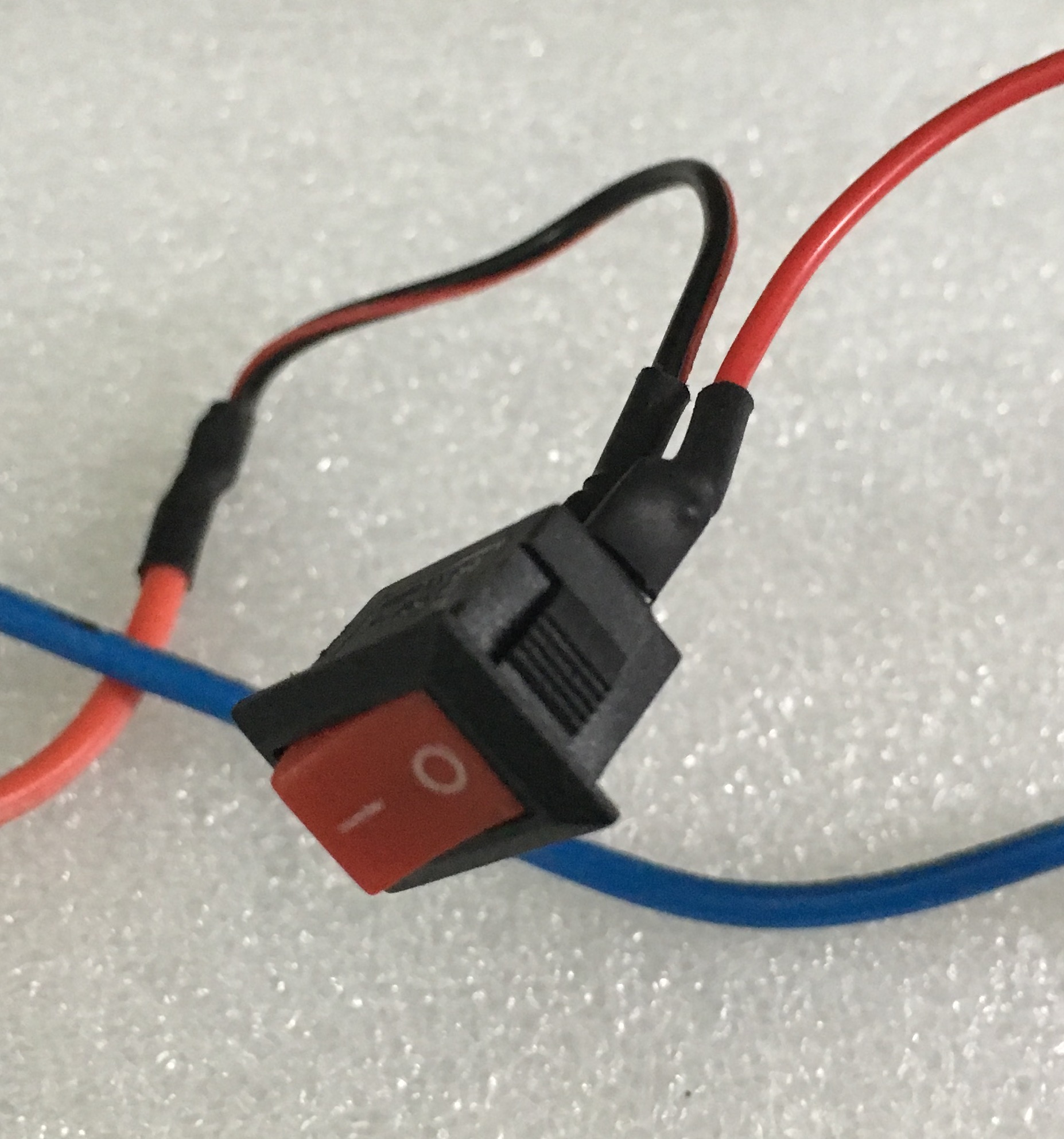
- Tiến hành hàn nối dây điện vào mạch boost, ở cực dương ngõ vào (IN+) thì hàn công tắc nguồn nối tiếp vào trước khi nối vô mạch boost.

Hàn dây ngõ ra có 2 màu liên biệt vào (OUT+, GND). 2 dây này sẽ được đấu nối vào Domino cầu H dùng làm nguồn 12V cho cầu H.
Mua màng co nhiệt để bọc vào mạch boost tránh chập điện với các phần tử khác trên xe.
3. CẦU H
Cầu H gồm 3 phần chính:
- Nguồn
- Tín hiệu điều khiển
- Ngõ ra lái 2 động cơ DC
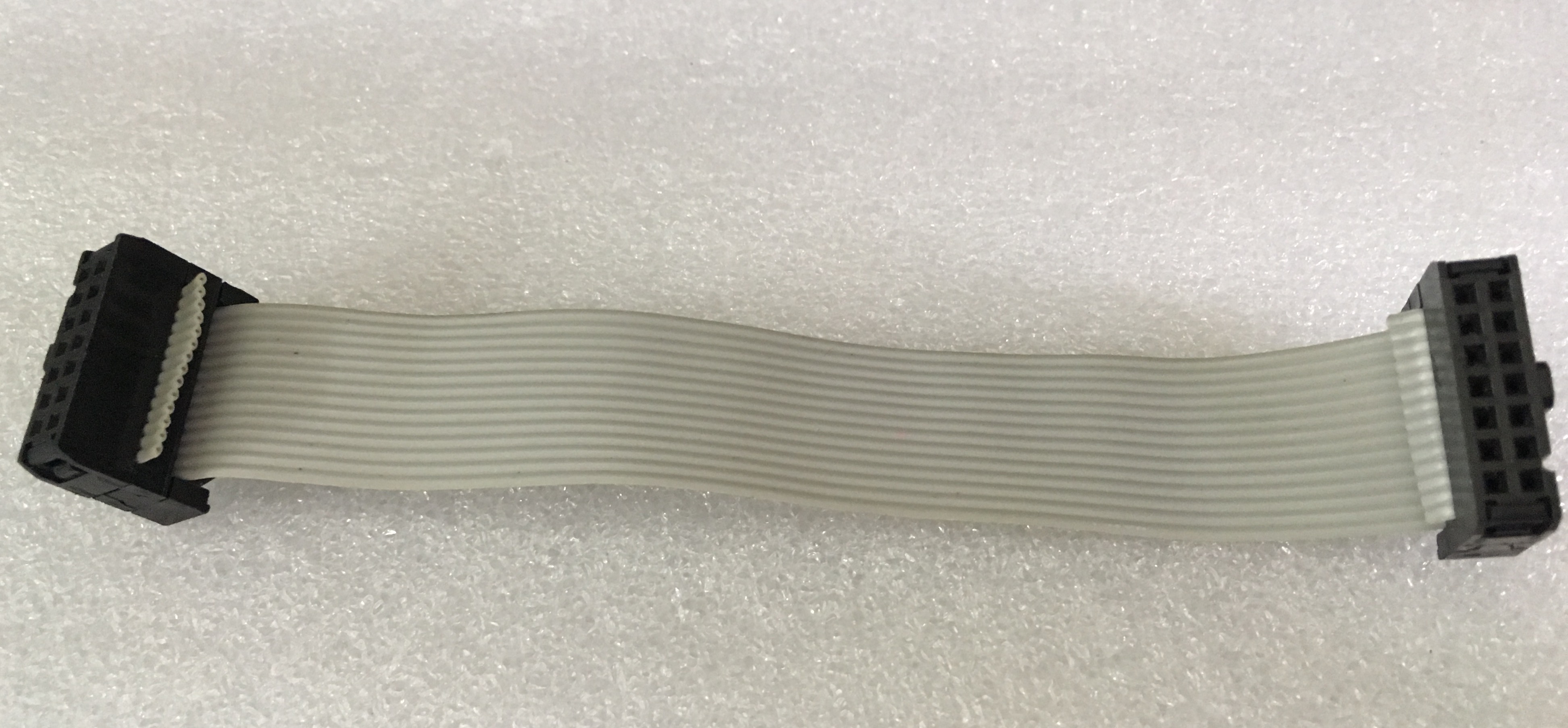
- Cắm cáp vào mạch cầu H.
- Đầu còn lại nối vào connector đen trên mạch main.
CHÚ Ý: Do loại connector này chỉ cắm được theo 1 chiều, các bạn nên cắm bus vào connector, rồi dùng VOM xem có đúng chiều không, sau đó mới hàn connector vô mạch Main để tránh bị ngược.
- Dùng 4 JUMPER để chọn mode cho phần điều khiển trên mạch cầu H như hình dưới.
CHÚ Ý NHÌN KỸ CẮM CHO ĐÚNG VỊ TRÍ!

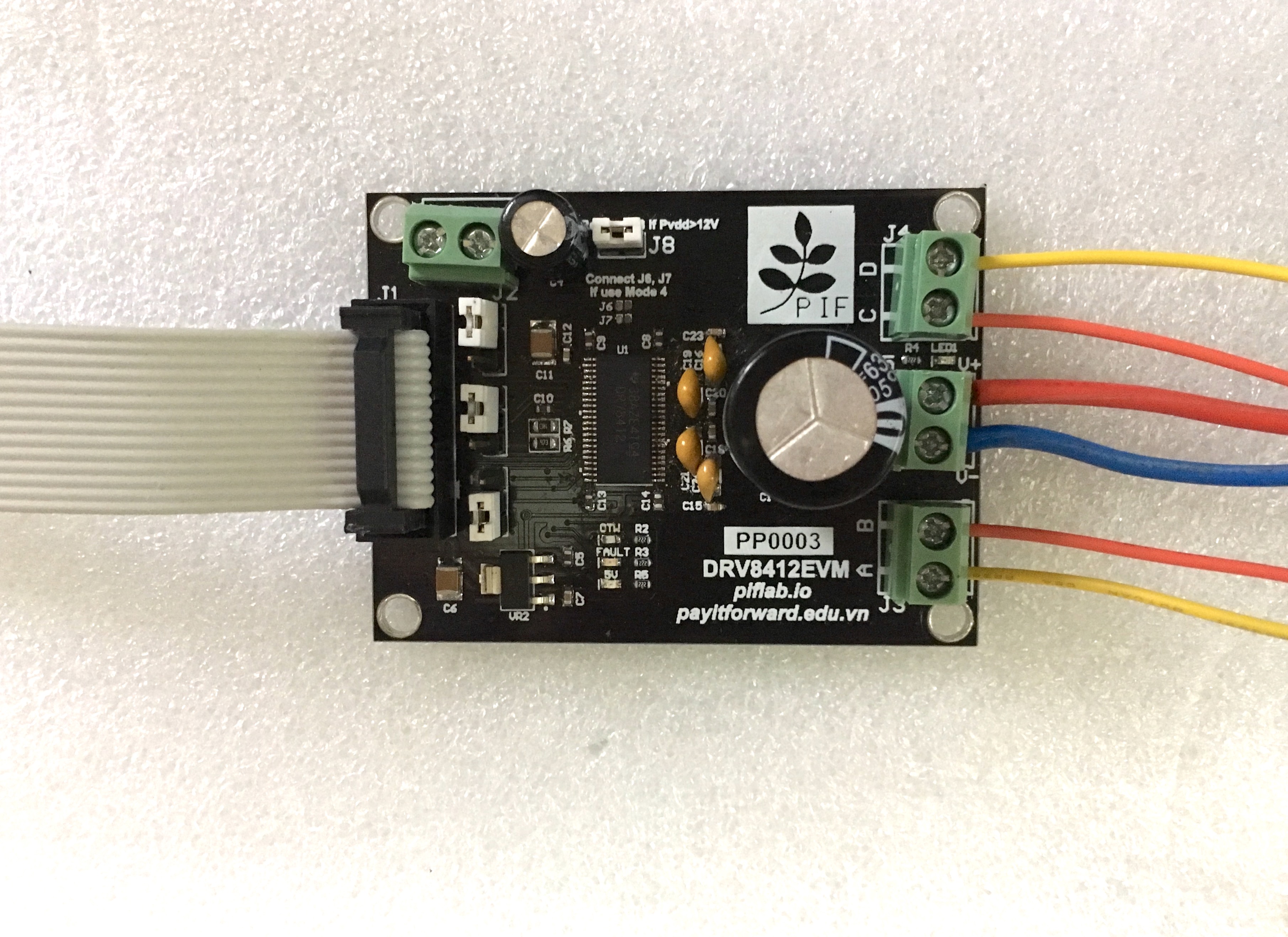
- Quan sát trên mạch, các bạn sẽ thấy các domino màu xanh lá. Chúng ta sẽ sử dụng 3 domino ở bìa phải, còn domino bên trái không sử dụng.
- J3 (A B): nối 2 dây động lực của motor 1 vào (màu CAM - VÀNG) trên bus 6 của motor 1.
- J4 (C D): nối 2 dây động lực của motor 2 vào (màu CAM - VÀNG) trên bus 6 của motor 2.
- DOMINO Giữa (V+ V-): Dùng để cấp nguồn 12V cho cầu H từ ngõ ra của mạch boost.
QUAN TRỌNG: Đấu dây cấp nguồn cho cầu H:
- Dây đỏ từ ngõ OUT+ trên mạch boost --> V+ trên cầu H
- Dây xanh từ ngõ GND trên mạch boost --> V- trên cầu H
TRƯỚC KHI BẬT CÔNG TẮC NGUỒN PHẢI CHẮC CHẮN MÌNH LÀM ĐÚNG, NẾU CÓ GÌ THẮC MẮC THÌ HỎI KỸ TRƯỚC KHI CẤP NGUỒN!
- Hình ảnh sau khi đã kết nối các phần vào cầu H. Chú ý màu sắc, cực tính, vị trí jumper.
4. MẠCH DÒ LINE
- Các bạn nên thiết kế mạch có BJT để bật tắt được LED dò line vì dòng qua LED khá lớn, nếu LED sáng liên tục sẽ mau hết Pin, và con robot sẽ thiếu sự thông minh.
- Chúng ta có thể tìm mua connector 12pin để kết nối board dò line với board Main.
- Có 11 tín hiệu: 8 ngõ ADC, 3.3V, GND, LED_EN.
- Nếu không mua được connector 12-pin thì dùng connector 10 như hình dưới, thêm 1 bus lẻ nối LED_EN.
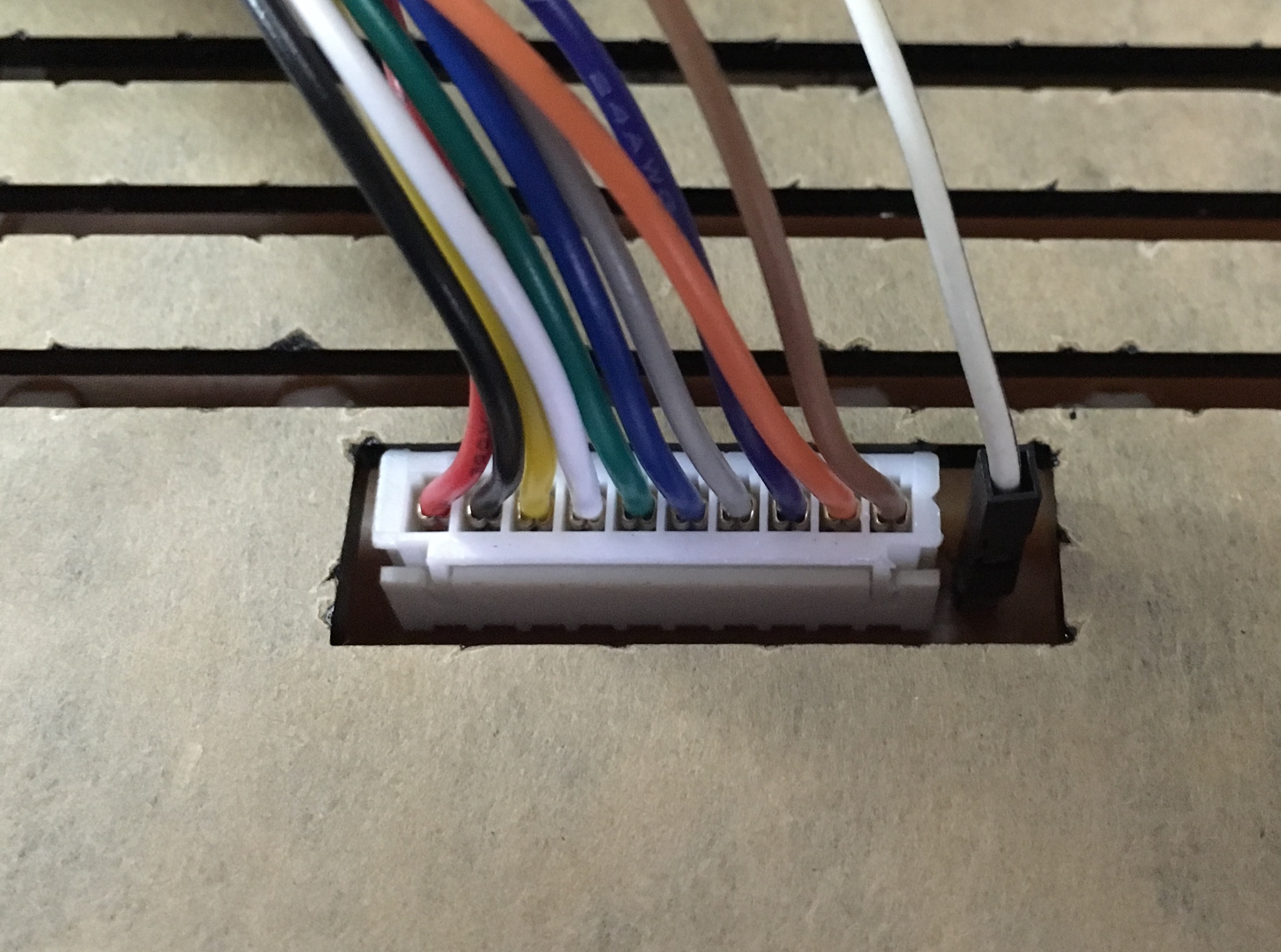

")